{kind=link}
I’ve been on a hot streak with my bot designs so I thought I’d make another post about about what I’ve been working on in the world of combat robots.
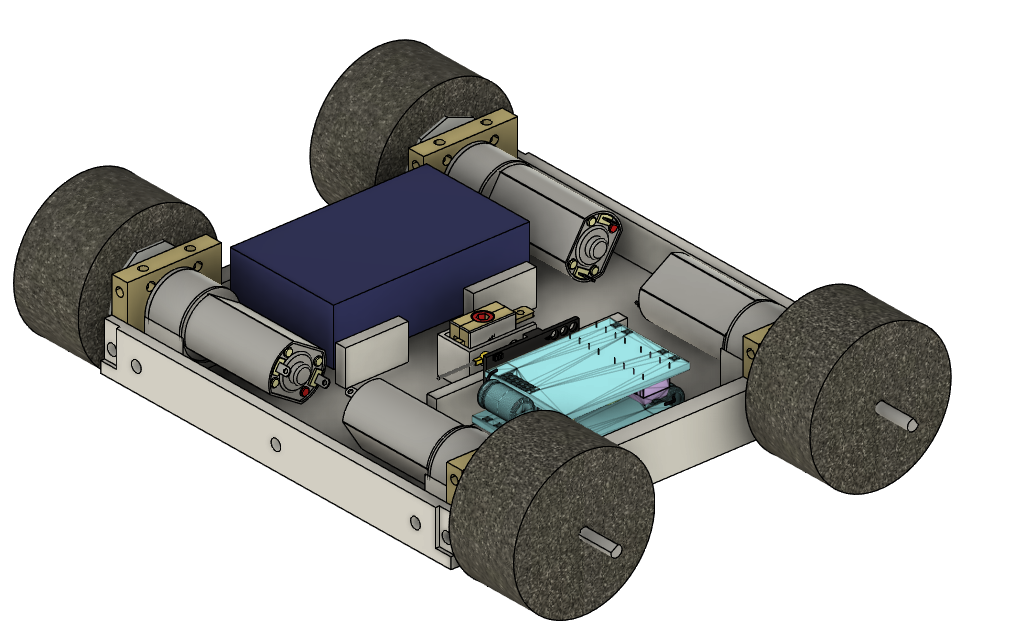
When I last left off, I hit a snag with GIANT ENEMY CRAB 2 and started a side project.. I started designing a new simple 1lb Antweight bot with a powerful four-wheel drive, with plans to give it an armored wedge and turn it into a defensive control bot. Where we left off it was basically a big box with the appropriate electronic and mechanical components, with plans for future mountings.
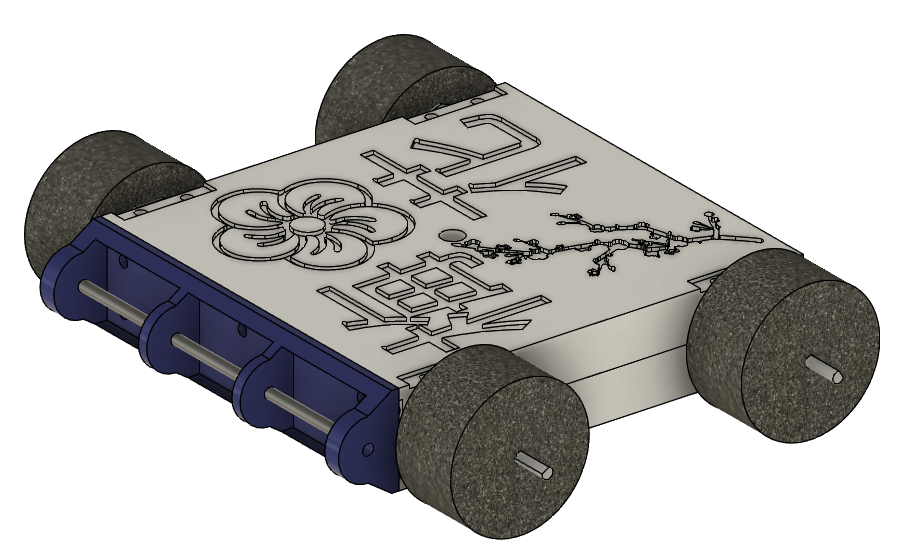
So the first big change I made was to how the lid would mount. My initial idea was to have the lid screw on to the 8 top holes in the bearing blocks that the motors are mounted onto. But then I thought, part of my design is that I wanted to be invertible. So why not split the whole bot in half like a clamshell, with each half screwing into 12 points (8 on the top/bottom, 2 on front and 2 on back)? I got to it. This left me with two major goals remaining for the bot: I needed to create an invertible defensive wedge on the front, and I needed to make the bot pretty and thematic as hell.
{kind=link}
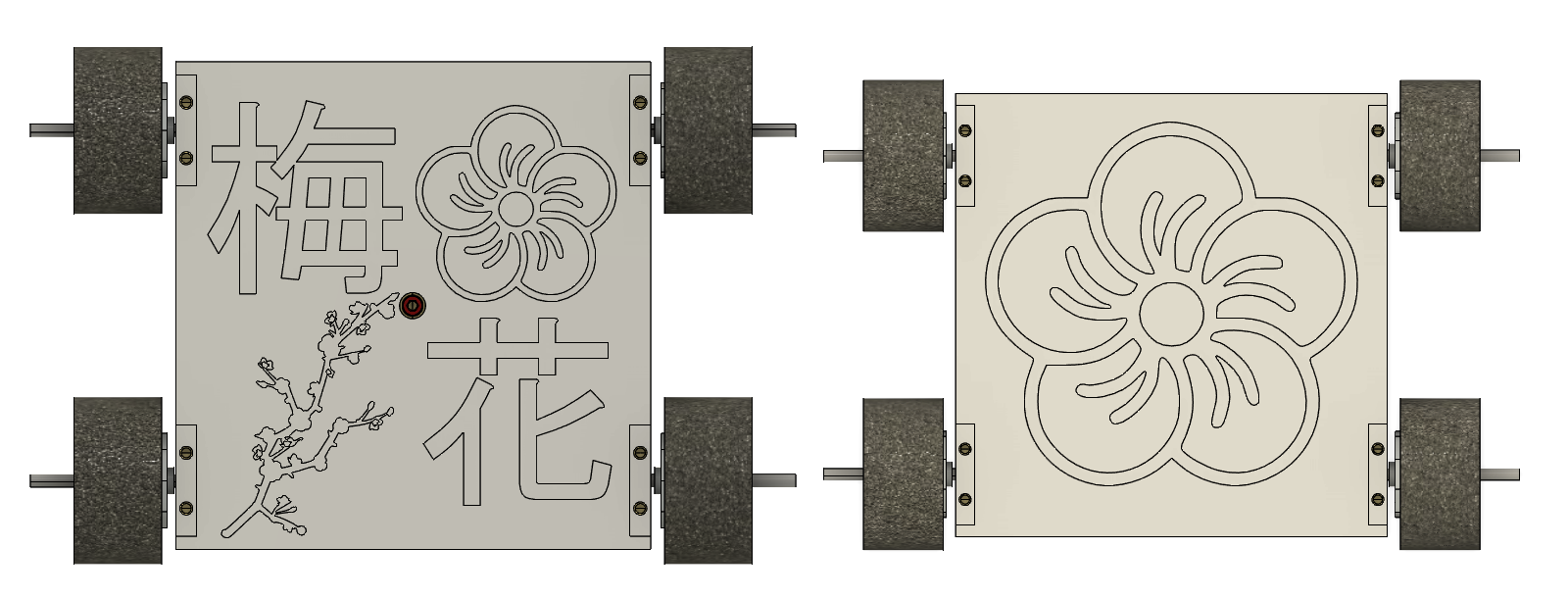
Ever since I saw the Botkits D2, I kinda wanted a pink one. I would name it 梅花 (Plum Blossom), and cover it with stickers of flowers and stuff. This bot is also going to be a four-wheel drive wedge of sorts, so I repurposed that name and theme. But unlike billet aluminum, 3d models are very easy to engrave, so I got to adding some SVG files in Fusion and engraving the top and bottom of the bot to the depth of 1mm (still 2mm at the narrowest point of the chassis). Here is the new top and bottom.
{kind=link}
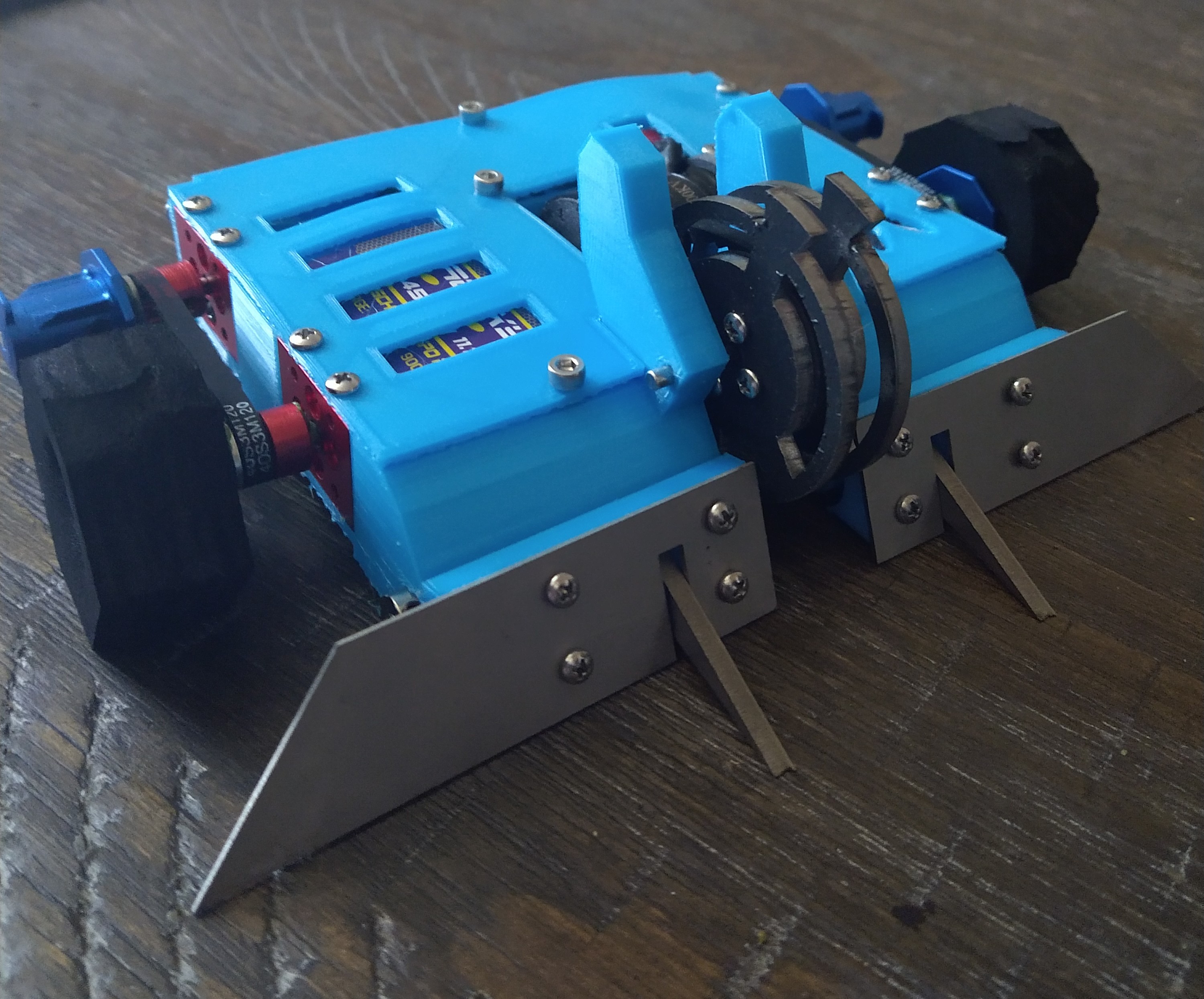
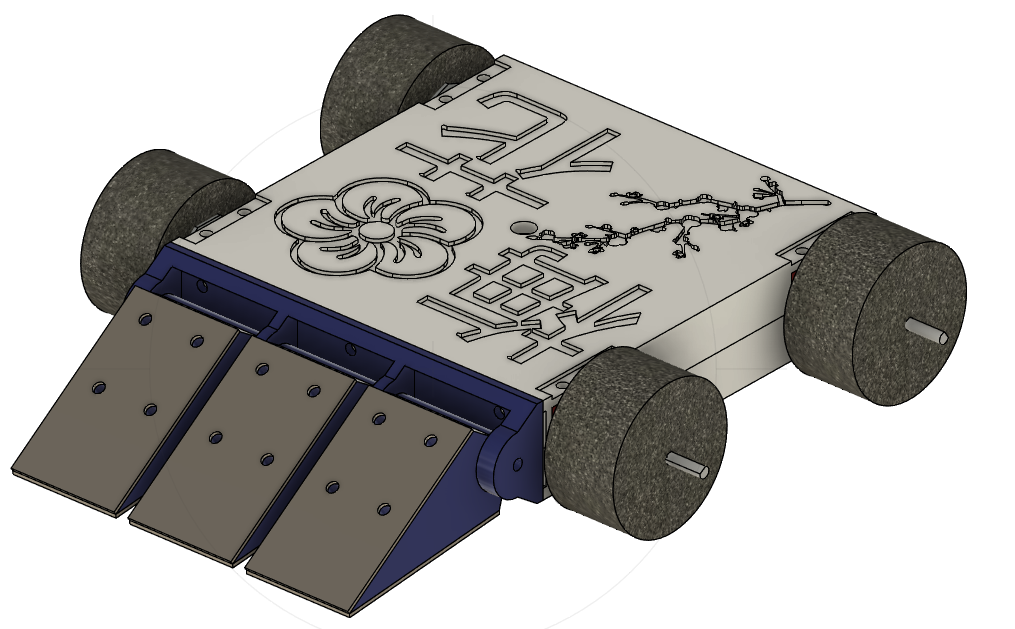
From there, I got to work on the wedge system. My most recent bot Jackalope used a hinged wedge system hanging on a loose pivot, using gravity to keep it low to the ground while having a good amount of give. I thought that would be a good idea for Plum Blossom’s wedge. I created a mounting bracket and mounted a series of wedgelets on the front similar to the heavyweight bot Free Shipping without the forklift or flamethrower. These wedgelets would be made of an impact-resistant material. and lined with titanium shingles on the top and bottom. They will pivot on the mounting bracket with gravity. Idea being, whether Plum Blossom is driving right side up or upside down, the wedgelets should be touching the floor and the bot will have a titanium wedge up front. Here is what I came up with.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Next I hit a crisis. My bot was basically ready. All I had to do was assemble, check the weight, and iterate. I could at least confidently buy the parts for it. So I go to my “”“local”“” Fingertech supplier and…
They’re sold out of Silver Spark motors. The core of the bot (the drive) is completely out of stock. The whole bot needs to go on hiatus.
If I were reasonable, I would go back to GIANT ENEMY CRAB 2. I have a drawer full of components, already own the electronics and motors, I have the start of a design, a decent blueprint for next steps. The problems I am facing aren’t unsurmountable. But I have a really bad case of Shiny Toy Syndrome.
Well last night, something funny happened. I had set aside a block of time to watch some Fusion360 tutorials and learn how to properly use my tools, but the Silver Spark shortage kept bugging me. I could order everything except the motors and wait for parts to restock, or I could order equivalent motors separately from Aliexpress and mate them with the Fingertech gearboxes, but it was all so inconvenient, and it would be easier to shelve the (basically complete) project until the supplier got a new batch of motors. But something on the website caught my eye.
For a long time I’ve dreamed of making a “shuffler” bot, as a stretch goal to test my engineering skills. Additionally, I recently learned that there is a local tournament coming in a few months that allows for a shuffler weight bonus. I resolved to build a bot for their Plastic Antweight class, since it seems to be the most active. Plastic Antweight is a special 1lb weight class where the chassis and weapon must be made of easily 3d printed materials, like PLA, ABS, or PETG. It creates an easy entry point for new builders who don’t have the means to create metal weapons or armor. The original GIANT ENEMY CRAB was made for this class, with its weapon and armor being made of PETG.
{kind=link}
So anyways, shufflers. Under certain rulesets, combat robots that eskew wheels in favor of cam-operated “legs” can get a 50% weight bonus to account for the complexity of this drive system. It’s a classic challenge for builders, designing a robut shuffling drive system that is light enough to take advantage of the weight bonus. Some bots like NHRL’s Silent Spring or Son of Whyachi from the classic Comedy Central series have used this weight bonus to great effect. At the 1lb weight class, that’s only an extra 226ish grams - hard to take advantage of given how much more shufflers weigh than wheels - but there are other ways to make use of that weight.
My first thought was a defensive control bot similar to Plum Blossom. Use my 1.5lb bot to push around opposing 1lb bots until the pit opens, then push them in. I won’t have as good traction as wheels, but will be much heavier than the opposition. After a little thought though, that seemed a little boring. I thought about what kind of active weapon would be easy to add to the robot, and settled on a vertical drum spinner.
Vertical drum spinners use a wide cylinder with teeth, spinning upwards to uppercut opponents. Bots like Minotaur and Shreddit Bro have shown that a fast-spinning compact mass can deal ample damage to opponents. Additionally, since I am building this for the Plastic Antweight class, I can make the whole drum out of a big single solid chunk of plastic, simplifying construction.
Back to shufflers and how they work. Shufflers work by turning rotational movement into linear movement with a camshaft, often using belts or gears to give the shuffling legs multiple points of connection with the chassis. Basically, offset circles rotate on a shaft in sync with each other, and those cause the legs to rotate forward to walk forward. My design uses 4 legs on each side to stabilize this movement by having a set of legs on the ground every quarter rotation. At all times there will be a leg at the North, South, East, and West, looking from the side. The legs will be supported on the front and rear, with the front support cam being connected to gears driven by the rear motor.
Now this mechanism is pretty heavy, so I want some strong motors to drive it. A set of four Silver Sparks as in Plum Blossom would be good, but then I would hit the same stocking problem. Looking at what the supplier does have in stock, I find these. Fingertech MegaSparks, big ol’ brushless motor mated to a gearbox, designed for 3lb bots. My bot has a complicated drive system, but it’s only half that weight. I order two of them, paired with appropriate electronics and mountings. They should be ENOUGH.
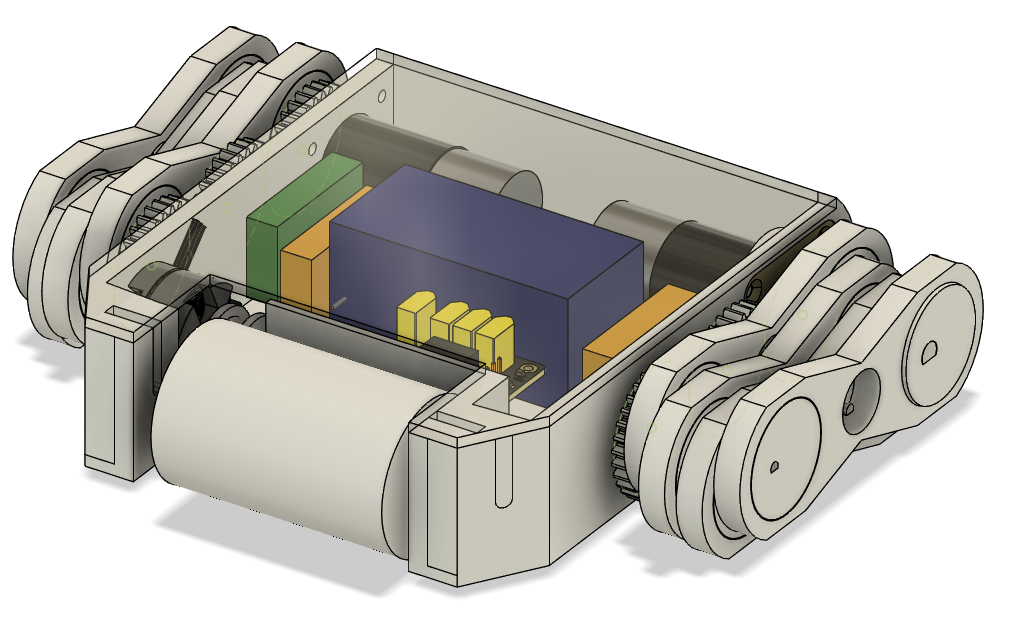
A feverish night of drunken bot design, much of which I don’t really remember, and I come up with this monster. Two four-legged shuffling mechanisms powered by oversized motors, with my last spare MT2204 brushless weapon motor up front driving a 40mm drum that has yet to be designed. The legs still need some refining (more grip where the leg meets the floor), and the cams could certainly use some speed holes. And it needs a weapon to replace the smooth cylinder it currently spins. After that it’s minor issues like attaching the lid and positioning the switch and stuff. I’ll also probably replace the PID (big board up front) for a more compact power switch, and use a smaller battery to keep under weight.
More importantly though, it needs a theme. This is the first bot I’ve made, where I don’t even know what I want to call it. It’s big (50% bigger than most competitors), it shuffles forward, and it uppercuts like other drum spinners. It will be made of PLA or ABS, so the parts could easily be any combination of colors, but I don’t know what to do. The bf suggests “Jitterbug” for the shuffling motion, but I’m open to names. What should I do to make this bot pretty?